Wednesday, March 10, 2021
12:00 p.m. EST
>>Join via Zoom.
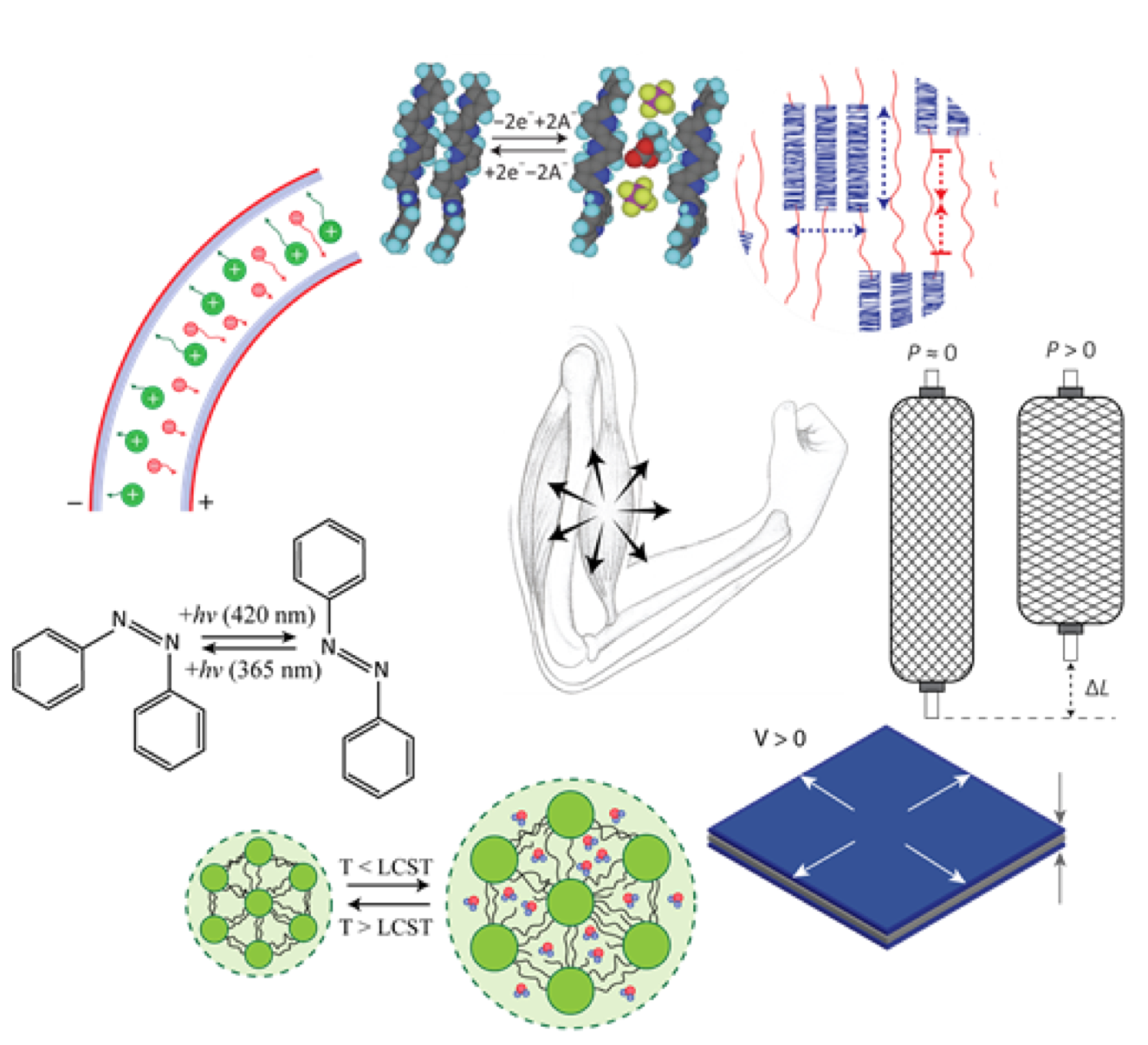
The area of artificial muscle is a highly interdisciplinary field of research that has evolved rapidly in the last 30 years. Recent advances in nanomaterial fabrication and characterization, specifically carbon nanotubes and nanowires, have had major contributions in the development of artificial muscles. However, what can artificial muscles really do for humans? This question is considered here by first examining nature’s solutions to this design problem and then discussing some of recently developed artificial muscles by Dr. Seyed Mirvakili.
Zoom Webinar Link: https://mit.zoom.us/j/98774144529
Join by Phone: US +1 646 558 8656 or +1 669 900 6833
Webinar ID: 987 7414 4529
International Dial-in Number: https://mit.zoom.us/u/a0e3RPXTm
About Speaker
Seyed Mo Mirvakili received his BASc degree (honors) in electrical engineering with a minor in nanotechnology and microsystems from UBC. He joined Molecular Mechatronics Lab in the electrical engineering department at UBC for his MASc degree, where he completed his degree. Then he started his PhD in the BioInstrumentation lab in the mechanical engineering department at MIT. For his postdoctoral training, he joined the Langer Lab at MIT. He has initiated and worked on various projects on artificial muscles, energy storage/harvesting devices, biomedical devices, and analog circuit design for the past decade He is the founder of Seron Electronics and the lead inventor on 8 patent applications.
Abstract
Artificial Muscle is an exciting emerging field that possesses immense potential for disruptive innovations in lightweight, cheap, and safe robots (from the nanoscale to macroscale) for healthcare, human-robot interactions, environmental and ecological stewardship, and well beyond. The designs and materials used for artificial muscles often exhibit a unique combination of properties that enable them to be used for other purposes such as energy storage, drug delivery systems, and biomedical devices. In this presentation, first, Mirvakili will discuss my research works on high-performance artificial muscle technologies. Then, Mirvakili will present two approaches in making the actuation of high performance soft robots untethered.